Chào các Bác, chào Thầy Vỵ,
Tôi xin phép được bới thớt này bằng 1 câu hỏi (hỏi thật lòng chứ không phải câu đố), nhờ Thầy Vỵ và các bác giải đáp và hỗ trợ giúp.
Trước khi hỏi, tôi túm lại phần trên một chút: muốn định được góc đánh lửa và xuất xung IGT chính xác thì về "phần cứng" ECU phải nhận được hai loại xung: xung G và và xung NE.
Câu hỏi của tôi: tôi đang làm hệ thống điều khiển động cơ 1 xylanh theo chương trình, phần cứng chỉ có 1 cảm biến loại từ (pulse generator, tôi gọi là cảm biến G&Ne) cung cấp xung vừa dùng cho đếm Ne, vừa dùng nó để định thời điểm cơ bản (G) cho đánh lửa.
Rắc rối của tôi: thời điểm đánh lửa (xuất xung IGT) chỉ có được sau khi có xung từ cảm biến G&Ne. Tức là đếm và tính toán cho chu kỳ nổ này, nhưng kết quả đó được thể hiện bằng xung IGT rơi vào chu kỳ nổ sau. Giả sử ECU của tôi tính toán được góc đánh lửa là X độ (cả cơ bản và hiệu chỉnh) thì tôi phải điều khiển theo kiểu 360 độ trừ X độ để đánh vào chu kỳ sau. Do đó gọi là mạch đánh lửa muộn 360-x độ thì đúng hơn :2:
Vấn đề nằm ở đó. Nhờ các Bác hỗ trợ giùm thuật toán điều khiển nào hay hơn, chứ tôi đã bế tắt.
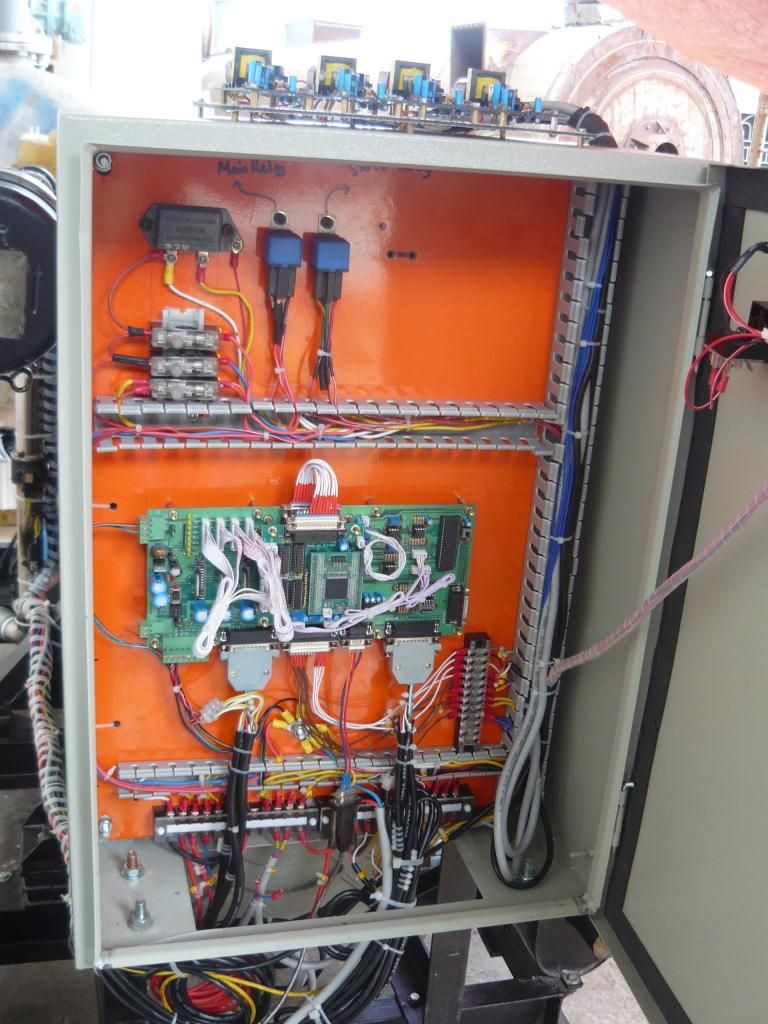
Trên thực tế thì mạch này vẫn chạy, động cơ hoạt động tốt, nhưng tự bản thân mình nhận thấy chưa OK trong điều khiển. Tôi là dân cơ khí 100%, nhưng cũng cố gắng tự thi công hoàn toàn kể cả thiết kế, vẽ mạch, hàn board, lập trình cho PIC16F887.., nhưng tự nhận sang lĩnh vực này mính đuối và chuối quá:2:
Động cơ đang trong giai đoạn test, chỉnh sửa chương trình, đo công suất... hôm nào rãnh tôi sẽ mở thớt post tiến trình thi công hầu chuyện các Bác.
Hôm nay mong các Bác hỗ trợ giúp.
Chúc các Bác năm mới nhiều sức khỏe, hạnh phúc, thành đạt.
Trân trọng. Minh
Tôi xin phép được bới thớt này bằng 1 câu hỏi (hỏi thật lòng chứ không phải câu đố), nhờ Thầy Vỵ và các bác giải đáp và hỗ trợ giúp.
Trước khi hỏi, tôi túm lại phần trên một chút: muốn định được góc đánh lửa và xuất xung IGT chính xác thì về "phần cứng" ECU phải nhận được hai loại xung: xung G và và xung NE.
Câu hỏi của tôi: tôi đang làm hệ thống điều khiển động cơ 1 xylanh theo chương trình, phần cứng chỉ có 1 cảm biến loại từ (pulse generator, tôi gọi là cảm biến G&Ne) cung cấp xung vừa dùng cho đếm Ne, vừa dùng nó để định thời điểm cơ bản (G) cho đánh lửa.
Rắc rối của tôi: thời điểm đánh lửa (xuất xung IGT) chỉ có được sau khi có xung từ cảm biến G&Ne. Tức là đếm và tính toán cho chu kỳ nổ này, nhưng kết quả đó được thể hiện bằng xung IGT rơi vào chu kỳ nổ sau. Giả sử ECU của tôi tính toán được góc đánh lửa là X độ (cả cơ bản và hiệu chỉnh) thì tôi phải điều khiển theo kiểu 360 độ trừ X độ để đánh vào chu kỳ sau. Do đó gọi là mạch đánh lửa muộn 360-x độ thì đúng hơn :2:
Vấn đề nằm ở đó. Nhờ các Bác hỗ trợ giùm thuật toán điều khiển nào hay hơn, chứ tôi đã bế tắt.
Trên thực tế thì mạch này vẫn chạy, động cơ hoạt động tốt, nhưng tự bản thân mình nhận thấy chưa OK trong điều khiển. Tôi là dân cơ khí 100%, nhưng cũng cố gắng tự thi công hoàn toàn kể cả thiết kế, vẽ mạch, hàn board, lập trình cho PIC16F887.., nhưng tự nhận sang lĩnh vực này mính đuối và chuối quá:2:
Động cơ đang trong giai đoạn test, chỉnh sửa chương trình, đo công suất... hôm nào rãnh tôi sẽ mở thớt post tiến trình thi công hầu chuyện các Bác.
Hôm nay mong các Bác hỗ trợ giúp.
Chúc các Bác năm mới nhiều sức khỏe, hạnh phúc, thành đạt.
Trân trọng. Minh